
Роботы! Это просто
Итак, несмотря на то, что японская компания Sony практически закрыла линейку производства роботов, и тема дальнейшего развития механических гуманоидов практически подвисла в воздухе… знамя подхватили корейцы. Причем, что отличает именно японские разработки в области роботов? Огромные средства, выделенные на их создание, полученные модели стоят очень больших денег и при этом достаточно мало могут. Ведь, если сказать прямо, роботы обладают запрограммированным "мозгом", который, в принципе, ничем не мощнее, чем простой РС, и ничем не сложнее, чем обычный софт, которым мы ежедневно пользуемся. То есть это программы управления сервомеханизмами, распознавания и синтеза речи, плюс можно заложить туда энциклопедии, возможность выхода в Интернет, беспроводную связь, GPS и т.д. То есть ничего необычного на самом деле нет.
Все очень просто!
Я, кстати, помню одну американскую разработку, где имелась просто механическая голова с шевелящейся челюстью. В компьютер вводишь текст: "Привет! Я — Макс", нажимаешь ввод, после чего голова произносит эту фразу. Разве это сложно? Отнюдь. Используется программа синтеза речи, динамик и один серводвигатель. Хотя в науч-поп новостях того времени это представлялось чуть ли не как "роботы среди нас". Ну и что… Сегодняшних роботов можно сделать очень недорогими — это, кстати, касается и гуманоидов. Давайте рассмотрим один интересный пример.
Robotis Bioloid
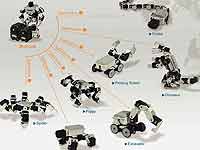
 Корейская компания Robotis (www.robotis.com) ведет свою историю с конца 90-х, и за ее плечами уже не одна разработка, новости о которой обошли весь мир. Bioloid — это более современное видение или даже подход к сборке современных роботов. Дело в том, что примерно начиная с начала этого столетия домашнее роботостроение начало приобретать большие масштабы, появилось множество специализированной литературы, интернет-магазины, в которых можно купить практически все необходимое — от систем дистанционного управления до сервоприводов и даже наборов винтов, гаек и отверток. Все было поставлено на поток, начало проводиться множество различных соревнований, причем их победители не только получали призы, но и продавали свои успешные модели в виде конструкторов. Это есть и сейчас, правда, в несколько меньшей степени, поскольку сегодня все увлечены искусственным интеллектом и машинными системами, самостоятельно принимающими решения в зависимости от ситуации. Но база комплектующих для данных машин заимствована из предыдущей волны роботостроения. Что же предложила компания Robotis в рамках проекта Bioloid? На самом деле она выпускает мини- конструкторы с уже готовыми сервомодулями (их несколько типов), из которых можно легко собрать любого робота, будь то гуманоид, роболошадь или мини-экскаватор. То есть мы говорим о своеобразных трансформерах. Данные сервомодули связываются между собой шлейфами по стандарту RS-485 и в сумме закоммутированы на небольшой главный блок управления. Они сообщают ему свой статус, то есть текущее положение, а взамен получают команды на выполнение. У каждого такого модуля есть свой личный идентификационный номер, что исключает всякую путаницу. В принципе, данный блок управления коммутируется на компьютер. То есть, если представить все более буквально, то представьте себе программу 3D-моделирования, в которой имеется таблица с параметрами каждого из сервомодулей, и вы самостоятельно можете изменять их. То есть получается некая интерактивная система. И, что самое интересное, в ней нет ничего особо сложного и супердорогого. Вы самостоятельно можете придумать свою собственную модель, потом высчитать, какие и сколько вам нужно сервомеханизмов, после чего приобрести и собрать их, учитывая то, что нужна еще и система питания. Специальная программная оболочка позволит этим роботом управлять. Изначально Bioloid продается в виде конструктора, но отдельные его элементы можно докупать впоследствии.
Корейская компания Robotis (www.robotis.com) ведет свою историю с конца 90-х, и за ее плечами уже не одна разработка, новости о которой обошли весь мир. Bioloid — это более современное видение или даже подход к сборке современных роботов. Дело в том, что примерно начиная с начала этого столетия домашнее роботостроение начало приобретать большие масштабы, появилось множество специализированной литературы, интернет-магазины, в которых можно купить практически все необходимое — от систем дистанционного управления до сервоприводов и даже наборов винтов, гаек и отверток. Все было поставлено на поток, начало проводиться множество различных соревнований, причем их победители не только получали призы, но и продавали свои успешные модели в виде конструкторов. Это есть и сейчас, правда, в несколько меньшей степени, поскольку сегодня все увлечены искусственным интеллектом и машинными системами, самостоятельно принимающими решения в зависимости от ситуации. Но база комплектующих для данных машин заимствована из предыдущей волны роботостроения. Что же предложила компания Robotis в рамках проекта Bioloid? На самом деле она выпускает мини- конструкторы с уже готовыми сервомодулями (их несколько типов), из которых можно легко собрать любого робота, будь то гуманоид, роболошадь или мини-экскаватор. То есть мы говорим о своеобразных трансформерах. Данные сервомодули связываются между собой шлейфами по стандарту RS-485 и в сумме закоммутированы на небольшой главный блок управления. Они сообщают ему свой статус, то есть текущее положение, а взамен получают команды на выполнение. У каждого такого модуля есть свой личный идентификационный номер, что исключает всякую путаницу. В принципе, данный блок управления коммутируется на компьютер. То есть, если представить все более буквально, то представьте себе программу 3D-моделирования, в которой имеется таблица с параметрами каждого из сервомодулей, и вы самостоятельно можете изменять их. То есть получается некая интерактивная система. И, что самое интересное, в ней нет ничего особо сложного и супердорогого. Вы самостоятельно можете придумать свою собственную модель, потом высчитать, какие и сколько вам нужно сервомеханизмов, после чего приобрести и собрать их, учитывая то, что нужна еще и система питания. Специальная программная оболочка позволит этим роботом управлять. Изначально Bioloid продается в виде конструктора, но отдельные его элементы можно докупать впоследствии.
А что дальше?
 Конечно, большого восторга от того, что робот пошевелил рукой, в то время как вы набрали другую цифру для одного из сервомодулей, изначально будет много, но это так... баловство одно. Систему Bioloid я просто привел в качестве примера, хотя подобного рода сервомодульные конструкторы сейчас должны появиться в большой своей массе. Причем важно тут понимать, что детали являются стандартными. И давайте лучше представим себе, что еще можно сделать на практике. Например, мы создали такого робота, правда, не такого миниатюрного, как в Bioloid, для того, чтобы в его туловище можно было поместить КПК или ноутбук (пока остановимся на варианте ноутбука). То есть у нас получается абсолютно автономная в плане питания система, полностью работающая на аккумуляторах (ноутбук на своих, сервомодули — на своих). Наверняка многие уже читали материалы по HTPC (Home Theater PC), в которых рассказывается, как с помощью обычного телевизионного пульта ДУ управлять компьютерным софтом. Это можно сделать и применительно к дистанционному управлению роботом. Плюс к этому (правда, я этот вариант пока не очень приветствую в силу несовершенства) системы распознавания речи. Ну, вы знаете такие программы типа "речь-в-текст", когда диктуешь предложение, и оно, например, записывается в Microsoft Word. Также есть попытки голосового управления компьютером:))))). Смеюсь, потому что помню, как установил такую лет эдак семь назад, долго надиктовывал команды, которые могли бы включать/отключать ту или иную программу. Затем запустил эту оболочку, по несколько раз повторял, мучался… в общем, потом громко чихнул, в результате чего одновременно запустились все программы, и компьютер полностью завис:). Но, в принципе, на данный момент я эту тему конкретно не прорабатывал — может, там что-то серьезное и появилось — в общем, голосовое управление потенциально возможно. Далее… делается интерактивная система звуковых откликов. Например, по какому-либо событию динамики ноутбука или же отдельный динамик, который вы подключили к аудиовыходу, воспроизводят некую фразу, записанную в wav-файле, типа "Я включился", "Иду на базу" и т.д. либо звуковой сигнал. Помимо этого, в продаже сейчас имеются портативные видеокамеры, с помощью которых можно сделать систему наблюдения либо распознавания изображений, датчики движения, дистанции, дыма, система GPS, которые могут напрямую связываться с компьютером. То есть в итоге мы выходим на тот уровень, когда все полностью зависит от программирования. При этом мы знаем программы синтеза речи, которые можно использовать для чтения текстов и любой необходимой информации. При удаленной связи можно использовать беспроводной Интернет и т.д.
Конечно, большого восторга от того, что робот пошевелил рукой, в то время как вы набрали другую цифру для одного из сервомодулей, изначально будет много, но это так... баловство одно. Систему Bioloid я просто привел в качестве примера, хотя подобного рода сервомодульные конструкторы сейчас должны появиться в большой своей массе. Причем важно тут понимать, что детали являются стандартными. И давайте лучше представим себе, что еще можно сделать на практике. Например, мы создали такого робота, правда, не такого миниатюрного, как в Bioloid, для того, чтобы в его туловище можно было поместить КПК или ноутбук (пока остановимся на варианте ноутбука). То есть у нас получается абсолютно автономная в плане питания система, полностью работающая на аккумуляторах (ноутбук на своих, сервомодули — на своих). Наверняка многие уже читали материалы по HTPC (Home Theater PC), в которых рассказывается, как с помощью обычного телевизионного пульта ДУ управлять компьютерным софтом. Это можно сделать и применительно к дистанционному управлению роботом. Плюс к этому (правда, я этот вариант пока не очень приветствую в силу несовершенства) системы распознавания речи. Ну, вы знаете такие программы типа "речь-в-текст", когда диктуешь предложение, и оно, например, записывается в Microsoft Word. Также есть попытки голосового управления компьютером:))))). Смеюсь, потому что помню, как установил такую лет эдак семь назад, долго надиктовывал команды, которые могли бы включать/отключать ту или иную программу. Затем запустил эту оболочку, по несколько раз повторял, мучался… в общем, потом громко чихнул, в результате чего одновременно запустились все программы, и компьютер полностью завис:). Но, в принципе, на данный момент я эту тему конкретно не прорабатывал — может, там что-то серьезное и появилось — в общем, голосовое управление потенциально возможно. Далее… делается интерактивная система звуковых откликов. Например, по какому-либо событию динамики ноутбука или же отдельный динамик, который вы подключили к аудиовыходу, воспроизводят некую фразу, записанную в wav-файле, типа "Я включился", "Иду на базу" и т.д. либо звуковой сигнал. Помимо этого, в продаже сейчас имеются портативные видеокамеры, с помощью которых можно сделать систему наблюдения либо распознавания изображений, датчики движения, дистанции, дыма, система GPS, которые могут напрямую связываться с компьютером. То есть в итоге мы выходим на тот уровень, когда все полностью зависит от программирования. При этом мы знаем программы синтеза речи, которые можно использовать для чтения текстов и любой необходимой информации. При удаленной связи можно использовать беспроводной Интернет и т.д.
Так что здесь сложного? По-моему, ничего, кроме программирования. Например, если вы сделали свою модель гуманоида, то сначала ее нужно научить механике, то есть ходить. И далее — по нарастающей.
В завершение
 В принципе, для обучения роботов различным движениям и жестам не нужно и особенно много программировать — можно взять за основу интерактив. То есть, если мы говорим о гуманоидах, то достаточно использовать датчики, которые вешаются на человека, и программу, которая записывает характер движения и переводит его применительно к сервомоторам. То есть нужна только одна программа. Точно таким же макаром можно записывать движения животных и т.д. Такие технологии уже давно и широко используются в индустрии кино и видеоигр. В общем, осталось буквально несколько лет для того, чтобы создать хорошо двигающихся роботов — далее пойдет чисто усовершенствование технологий и материалов. Например, сейчас стоит достаточно большая проблема в том, что механические мышцы намного слабее биологических, о чем писалось уже много раз. И следующая серьезная проблема — искусственный интеллект. Лично мое мнение — нужно начинать с эмуляции стереовидения и бинаурального слуха.
В принципе, для обучения роботов различным движениям и жестам не нужно и особенно много программировать — можно взять за основу интерактив. То есть, если мы говорим о гуманоидах, то достаточно использовать датчики, которые вешаются на человека, и программу, которая записывает характер движения и переводит его применительно к сервомоторам. То есть нужна только одна программа. Точно таким же макаром можно записывать движения животных и т.д. Такие технологии уже давно и широко используются в индустрии кино и видеоигр. В общем, осталось буквально несколько лет для того, чтобы создать хорошо двигающихся роботов — далее пойдет чисто усовершенствование технологий и материалов. Например, сейчас стоит достаточно большая проблема в том, что механические мышцы намного слабее биологических, о чем писалось уже много раз. И следующая серьезная проблема — искусственный интеллект. Лично мое мнение — нужно начинать с эмуляции стереовидения и бинаурального слуха.
Кристофер, christopher@tut.by
Все очень просто!
Я, кстати, помню одну американскую разработку, где имелась просто механическая голова с шевелящейся челюстью. В компьютер вводишь текст: "Привет! Я — Макс", нажимаешь ввод, после чего голова произносит эту фразу. Разве это сложно? Отнюдь. Используется программа синтеза речи, динамик и один серводвигатель. Хотя в науч-поп новостях того времени это представлялось чуть ли не как "роботы среди нас". Ну и что… Сегодняшних роботов можно сделать очень недорогими — это, кстати, касается и гуманоидов. Давайте рассмотрим один интересный пример.
Robotis Bioloid
А что дальше?
Так что здесь сложного? По-моему, ничего, кроме программирования. Например, если вы сделали свою модель гуманоида, то сначала ее нужно научить механике, то есть ходить. И далее — по нарастающей.
В завершение
Кристофер, christopher@tut.by
Компьютерная газета. Статья была опубликована в номере 14 за 2006 год в рубрике робототика
